My first attempt at building a tricopter. It was meant to be as cost effective as possible and was equipped with a beastvision later on. It was controlled with a KK board, pretty much the simplest solution I could find. As ESCs I used the ones from my KDS helicopters, but that didn´t went out that well because one of them were different so the RPM were set incorrect for a stable hover even after multiple calibration attempts.
The wooden frame with alumium arms before the electronic were connected
The most delicate part was the build of the yaw mechanism. I ended up using a blade grip from a 450 RC Helicopter. That was glued in together with some bearings into the aluminum arm.

YAW Mechanism with zip tied servo
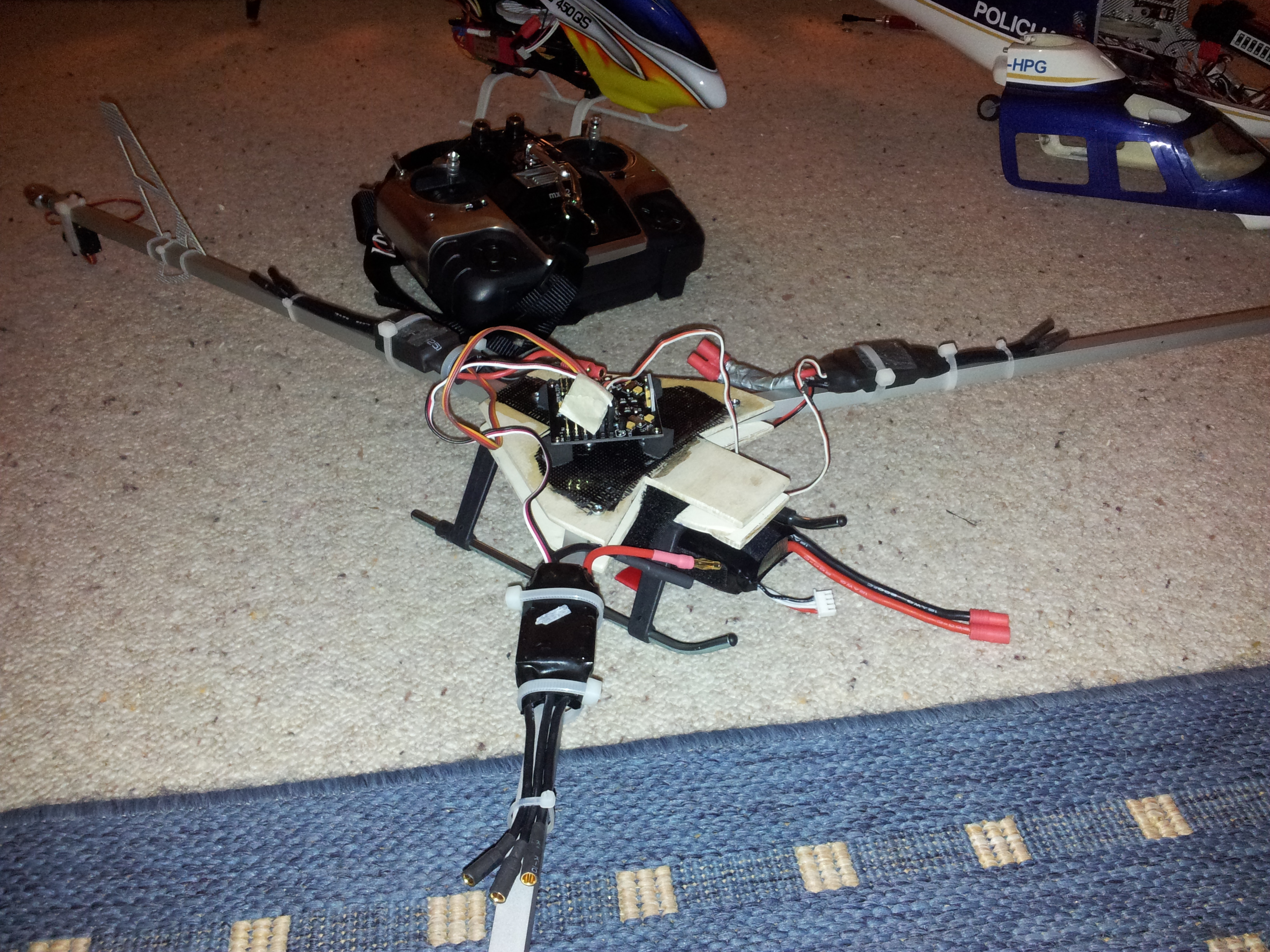
It came out like this after all components, including a flycam, were mounted. It flew pretty well but wasn´t very useful.
First Version with recycled components
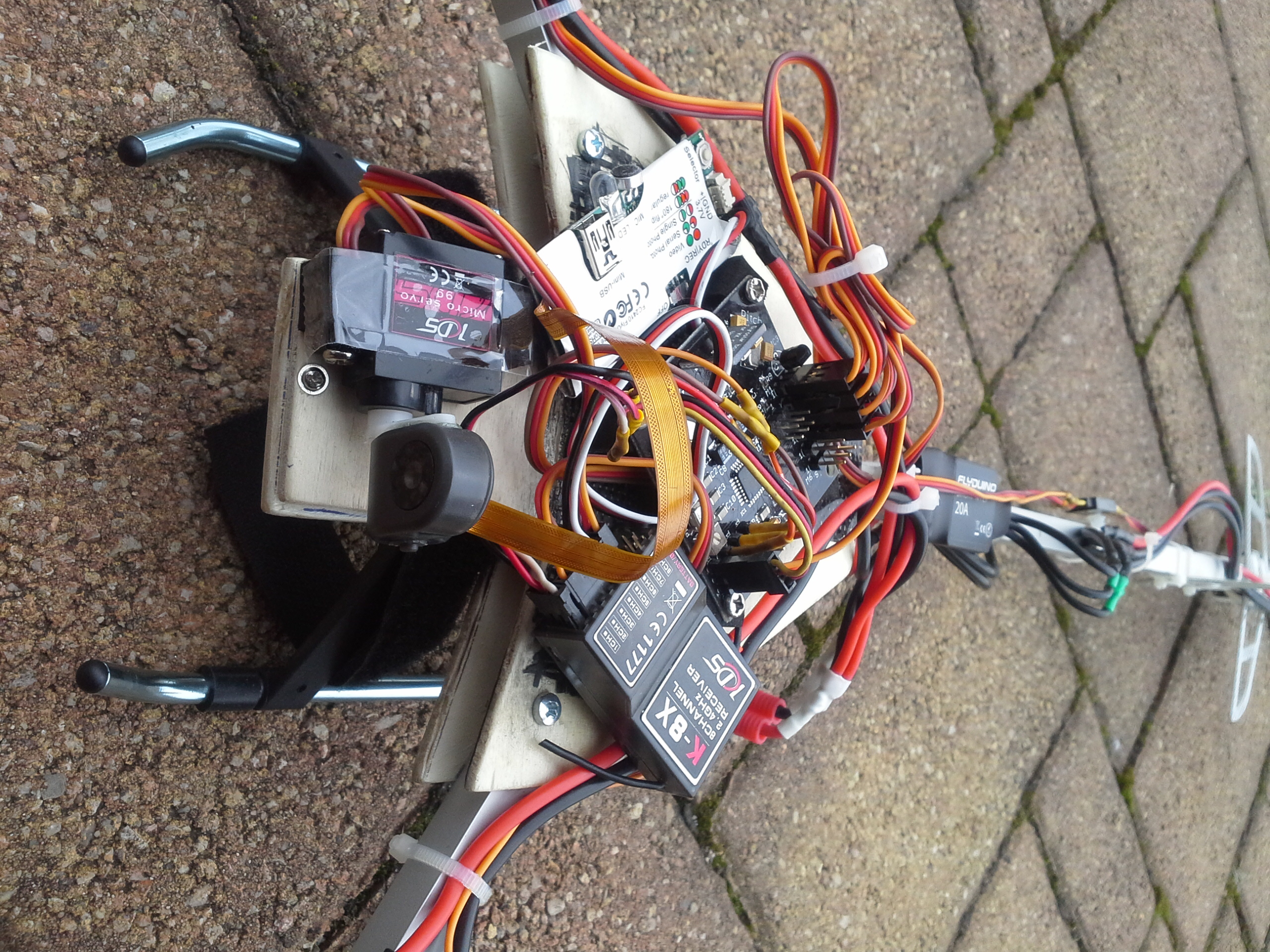
I added a better camera and protected the flight controller with a second deck made out of plywood.

Front view with Exilim z1080
This was tmy first step into the multirotor universe, with nothing magical involved. I learned quite a lot from this and it was even used to shoot some footage of a flood and some drfiting action. The lack of a gimbal and the very basic flight controller made it difficult to gather good video material.
Hallo,
ich interesiere mich auch für eine MPCNC und es wäre das erste NC-Gerät für mich. Für Tipps beginnend bei der Beschaffung bis zu Fallen beim Aufbau wäre ich sehr dankbar!
Gruß Ernst-Dieter
Hallo Ernst-Dieter,
danke für deinen Kommentar, ich werde dazu in naher Zukunft einen deutschsprachigen Eintrag verfassen. Die Lieferanten dazu werde ich mit integrieren.
Grüße
Thomas